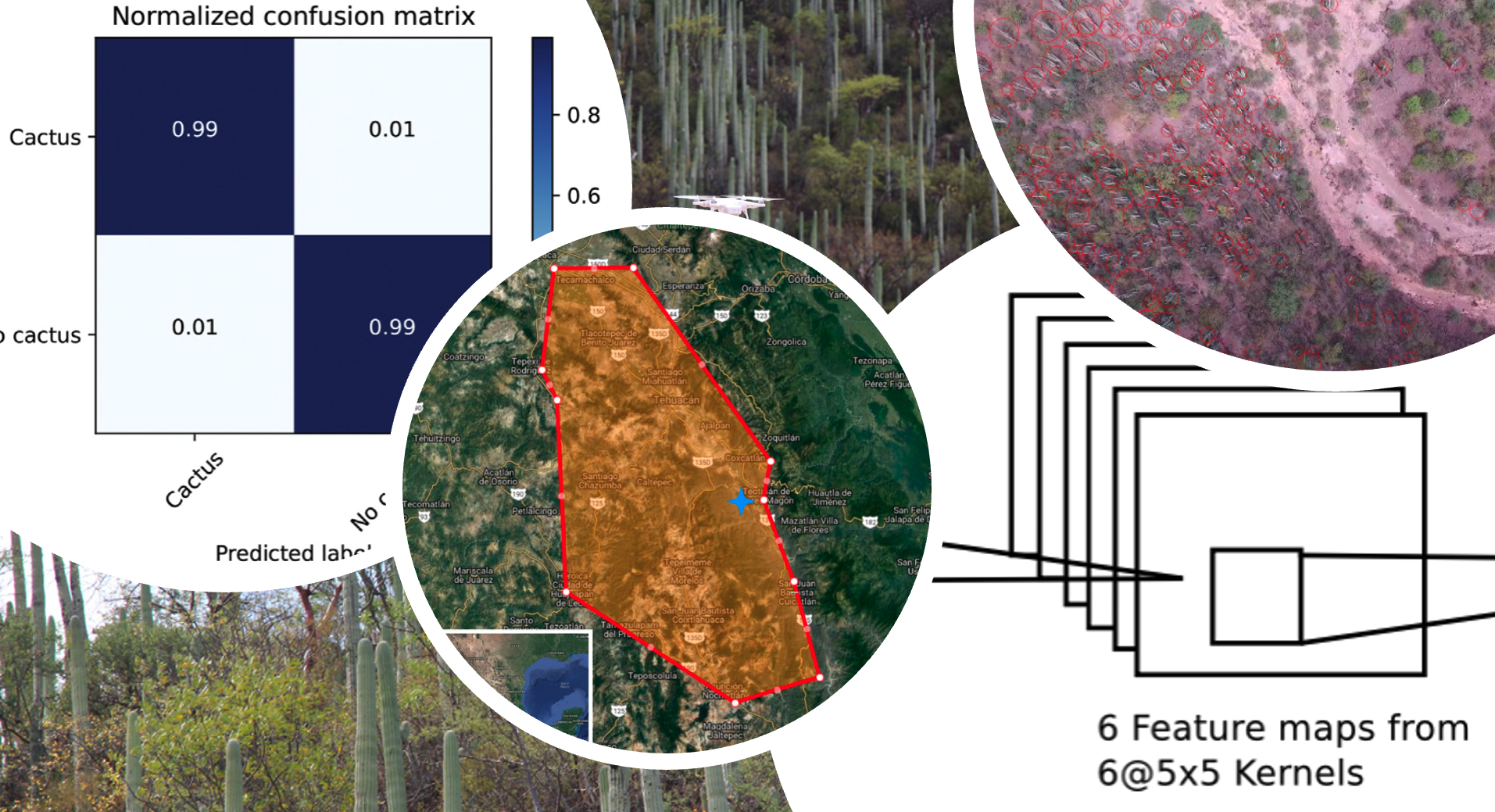
Reconocimiento de Cactus Columnares en Imágenes Aéreas utilizando Aprendizaje Profundo
Se presenta un enfoque basado en aprendizaje profundo para reconocer las especies de cactus en el Valle de Tehuacán-Cuicatlán. El objetivo es comenzar por reconocer estas especies y luego extender el sistema para segmentar y reconocer otras. Debido a la rica diversidad de especies de cactus y la falta de un conjunto de datos específico, se ha seleccionado a Neobuxbaumia tetetzo como el objetivo a reconocer en este primer estudio.
Plataforma para la Difusión de Alimentos Tradicionales de la Gastronomía Oaxaqueña
A través de esta plataforma puedes conocer los alimentos tradicionales de la gastronomía oaxaqueña, los ingredientes necesarios y la receta para prepararlos.
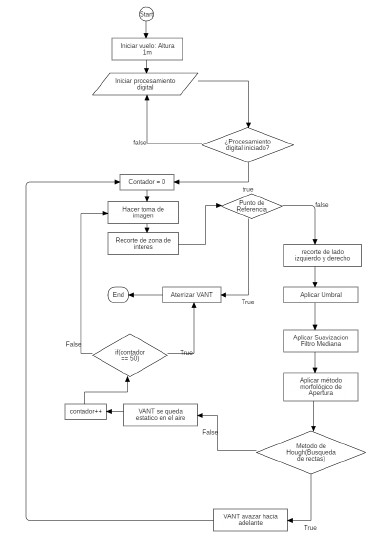
El objetivo de este trabajo es implementar un algoritmo que permita el vuelo autónomo de un VANT por pasillos de adoquín color gris a una altura de 1m (altura prevista del despegue) de tal manera que sea factible guiarse únicamente con la cámara integrada del VANT de 14 mega píxeles la cual se utilizó para la captura de imágenes. El algoritmo está constituido de las siguientes etapas: umbralización para buscar los bordes del pasillo, suavización para eliminar ruido de la imagen, operación morfológica de apertura para definir el esqueleto de los bordes y finalmente, algoritmo de Hough (1972) para verificar que existan dos bordes en los pasillos. Para realizar las pruebas del algoritmo se utilizó el VANT Parrot Bebop 2. Este VANT cumple con las características básicas para la investigación; además de su bajo costo, cuenta con un SDK (parrotSDK) con el cual se puede manipular el controlador de vuelo, la cámara integrada y la conexión por WiFi.
Algoritmo de ControlImágen captada por el VANTRecorte de las esquinas inferioresFiltro de umbralizaciónFiltro de suavizaciónBordes detectados (Algoritmo de Hough)Bordes no detectados (Algoritmo de Hough)